


The Florida Institute for Human & Machine Cognition (IHMC) is very well recognised in bipedal robotics circles for educating pretty complicated humanoid robots to wander. Considering the fact that 2015, IHMC has been dwelling to a Boston Dynamics Atlas (the DRC model) as very well as a NASA Valkyrie, and substantial progress has been designed on advancing these platforms towards trustworthy mobility and manipulation. But fundamentally, we’re chatting about some extremely aged components below. And there just are not a lot of great substitute options (offered to scientists, anyway) when it comes to humanoids with human-equivalent toughness, velocity, and flexibility.
Numerous yrs back, IHMC made a decision that it was superior time to make its very own robotic from scratch, and in 2019, we noticed some really neat plastic principles of Nadia—a humanoid designed from the floor up to carry out handy responsibilities at human pace in human environments. After 16 (!) experimental plastic variations, Nadia is now a real robotic, and it already appears really spectacular.
For a lengthy time, we’ve been pushing up towards the boundaries of the components with DRC Atlas and Valkyrie. We haven’t been ready to completely explore the limitations of our software package and our controls. With Nadia, it’s the other way around, which is seriously thrilling from a investigation point of view.
—Robert Griffin, IHMC
Created to be effectively the next generation of the DRC Atlas and Valkyrie, Nadia is quicker, additional versatile, and sturdy enough to make an fantastic analysis system. It’s a hybrid of electric powered and hydraulic actuators: 7 degrees-of-flexibility (DoF) electric arms and a 3 DoF electrical pelvis, coupled with a 2 DoF hydraulic torso and 5 DoF hydraulic legs. The hydraulics are integrated good actuators, which we have coated in the previous. Nadia’s joints have been arranged to improve vary of movement, meaning that it has a dense manipulation workspace in front of by itself (wherever it genuinely issues) as effectively as extremely cellular legs. Carbon fiber shells covering most of the robotic permit for safe and sound make contact with with the ecosystem.
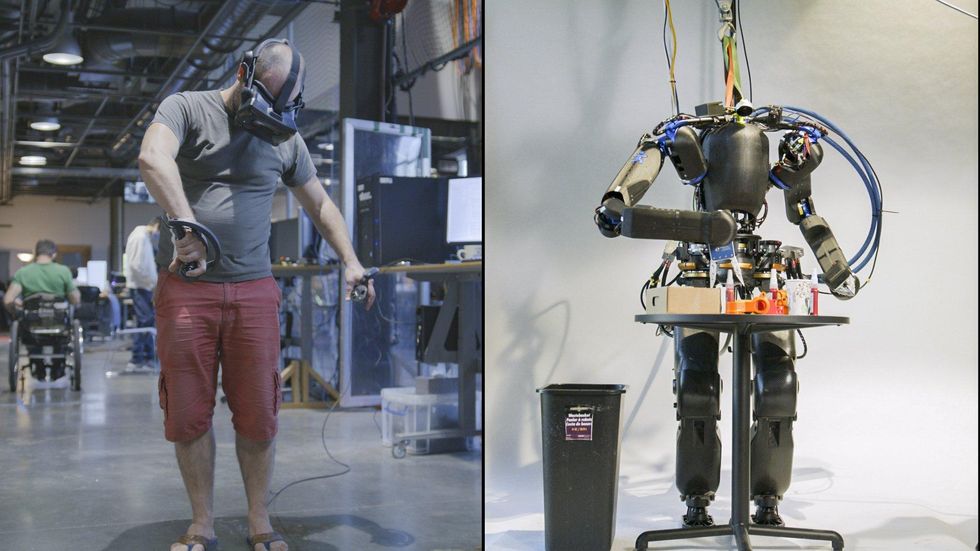
Teleoperation by means of immersive virtual fact aids Nadia perform complex responsibilities.IHMC
That significant manipulation workspace is especially applicable mainly because there’s a lot of emphasis on immersive digital fact teleoperation with Nadia. Not that autonomy is not crucial, but the idea at the rear of Nadia has been formed (at minimum in aspect) by IHMC’s expertise at the DARPA Robotics Challenge Finals: Ideally, you want the robot to regulate anything it can on its very own, when having a human capable to just take far more direct regulate over elaborate duties. While it is not the fantasy of a robotic staying totally autonomous, the simple fact is that in the around phrase, this approach is an promptly feasible way of having robots to reliably do practical points in unstructured environments. General, the purpose with Nadia is to operate as near to human speed as feasible when performing city exploration and manipulation tasks. And if that entails a human directly teleoperating the robotic due to the fact which is the very best way of executing matters, Nadia is designed to cope with it.
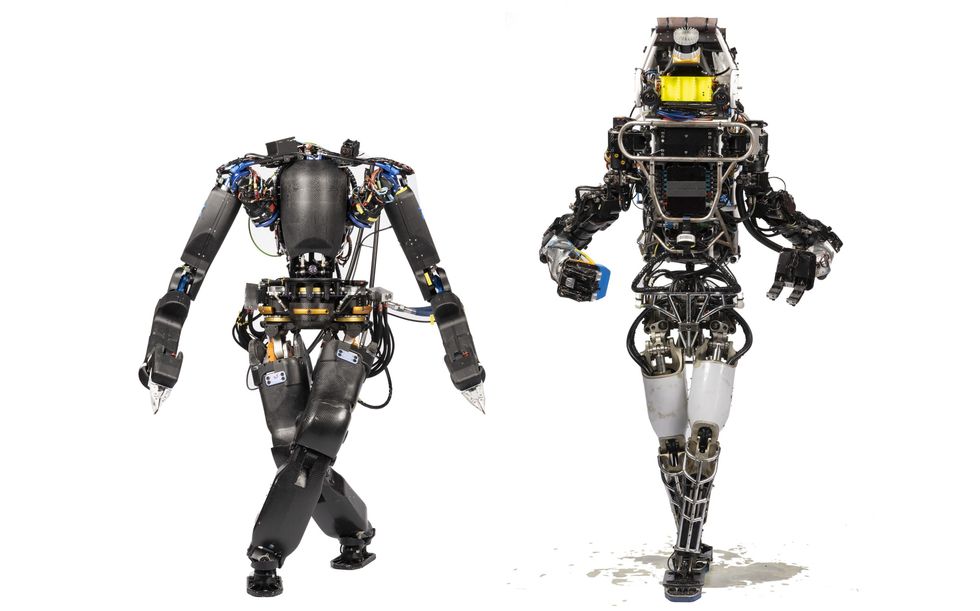
Nadia demonstrates how a great deal far more flexible its hips and legs are relative to DRC Atlas.IHMC
For much more specifics about Nadia, we spoke with Robert Griffin, a exploration scientist at IHMC.
How is Nadia exceptional between humanoid robots?
Robert Griffin: I consider the significant issue that we’re making an attempt to bring to the desk with Nadia is the truly significant array of motion of a good deal of the joints. And it’s not just the range of motion that differentiates Nadia from lots of other humanoid robots out there, it’s also pace and electric power. Nadia has substantially much better ability-to-fat than the DRC Atlas, building it drastically faster, which increases its normal operational pace as properly as its steadiness.
Can you place your aims with Nadia into context in the humanoid robotics room?
Griffin: We’re making an attempt to make Nadia a robotic that can function in unstructured environments the place you do not know what it demands to do ahead of time. So, in its place of getting a set sequence or quantity of responsibilities, we’re striving to develop up a robot in components, software package, and interfaces that empower a human-machine crew to go into an unknown environment, take a look at it, map it, and then do meaningful duties.
IHMC has a status for encouraging complicated humanoid robots like DRC Atlas and Valkyrie with their mobility. How has all of that practical experience made its way into Nadia’s design and style?
Griffin: You are right, and we’ve been partnering with NASA JSC considering the fact that the DRC—when you see Valkyrie going for walks now, it’s working with IHMC software program and controllers. When it arrives to applying some of that knowledge to Nadia, we’ve paid out distinctive consideration to points like Nadia’s vary of movement in its legs. As opposed to a good deal of humanoid platforms, Nadia has definitely superior hip roll (or ab/adduction), which suggests that it can do truly broad methods and also actually slim steps in which the ft overlap just about every other. We believe that’s going to assistance increase mobility by assisting with action adjustment and reaching tough footholds.
Outside of the hardware, we ended up also equipped to use our simulation equipment and manage stack to really enable us specify what the components layout essential to be in purchase to achieve some of these duties. We weren’t able to improve all of the joints on the robot—we quite a great deal stuck with a single hydraulic piston in the legs, for now, but we hope that our long term designs will be superior built-in and optimized. We do have entire ankle actuation, contrary to a great deal of humanoid robots. Our method, from the commencing, was to seem for the necessary regulate authority with Nadia’s ft to be able to do exact foot placement, and use that for reasonably rapid reactive mobility.
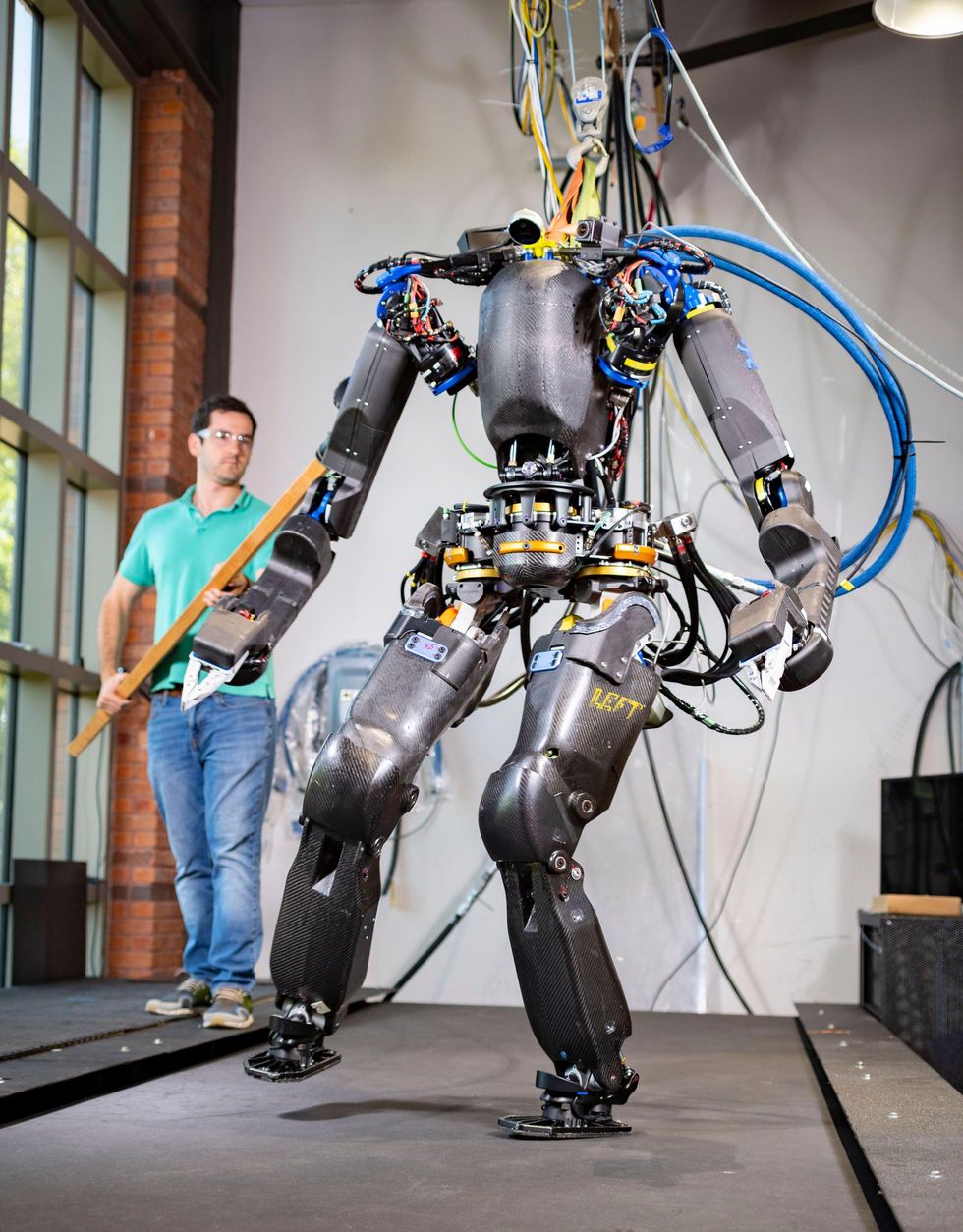
Robert Griffin offers Nadia a handy shove, for science.IHMC
As you went from principle to components with Nadia, what compromises did you have to make?
Griffin: We’re not quite as versatile as a usual human, though we’re not extremely far off. I was amazed that we lost some vary of movement in the mechanisms just for the reason that of the hydraulic hose routing, specifically all around the hips, exactly where we desired to stay away from obtaining significant loops of hoses hanging off the robotic. We eventually want to just take Nadia into the real earth, and we really don’t want the hoses finding snagged on matters.
Nadia is not very as speedy as a human in some of the joints, and in some of the joints it’s speedier. We’re also not really as compact as we wanted to be at first, simply because, very well, robots are really difficult. We’re hoping to get it a small additional compact in the potential. And we missed our excess weight margin by a very little bit—it’s about 90 kilograms right now, without having the hydraulic pump or battery on board.
Why did you determine to concentration on how a human can straight regulate Nadia in VR, as opposed to far more emphasis on autonomy?
Griffin: Autonomy will work really, actually well when you know what the functioning situations are, and what you’re trying to execute. Not that it is quick to automate that, but it’s feasible. We’ve experimented with some autonomous scheduling and manipulation, and we located that it’s a small restricting in that it doesn’t acquire benefit of the entire abilities of our system. And so what we’re wanting at performing is hoping to automate just vital elements of the system—things like footstep preparing and grasp organizing, which can be automated very effectively. But we also will need the means to interact with novel environments, which is why we’re focusing on creating ways to team with humans by interfaces like virtual truth. With the cognitive capabilities of a human put together with the manipulation capabilities of the robot, we imagine you get a ton of flexibility.
How much of a variation has it manufactured to controlling Nadia in VR, that the components has humanlike adaptability and a humanlike workspace?
Griffin: For manipulation, it’s been huge. We really don’t want the consumer to be operating the robot and experience like they are minimal in what they can do for the reason that of the robot’s constraints. A lot of the manipulation that we’ve been ready to do with Nadia we could never ever have completed with our other platforms.
There are definitely trade-offs—the arms are a lot more created for velocity than for toughness, which is going to be a minimal little bit restricting, but we’re hoping to increase that prolonged-phrase. I think that designing the robot—and particularly the management program and application architecture—with the plan of getting a human running it has opened up a whole lot of functionality that we hope will let us speedily iterate alongside many unique paths.
What are some items that Nadia will be uniquely able of?
Griffin: We’re hoping that the robotic will be uniquely able of multicontact locomotion—that’s a way that we’re truly hoping to move in, where by we’re not just relying on our toes to transfer by the environment. But I really don’t always want to say that it’ll be improved at that than other robots are, because I do not know every thing that other robots can do.
Are there functional tasks that you hope Nadia will be able to do at some place in the upcoming?
Griffin: Factors like catastrophe response, nuclear remediation, bomb disposal—these duties are mainly completed by folks proper now, simply because we don’t have robots that are really capable of performing them adequately irrespective of the amount of money of time that roboticists have been doing work on it. I believe that by partnering outstanding robotic engineering with genuinely incredible working interfaces and human cognition, these duties will begin to come to be feasible to do by a robot.
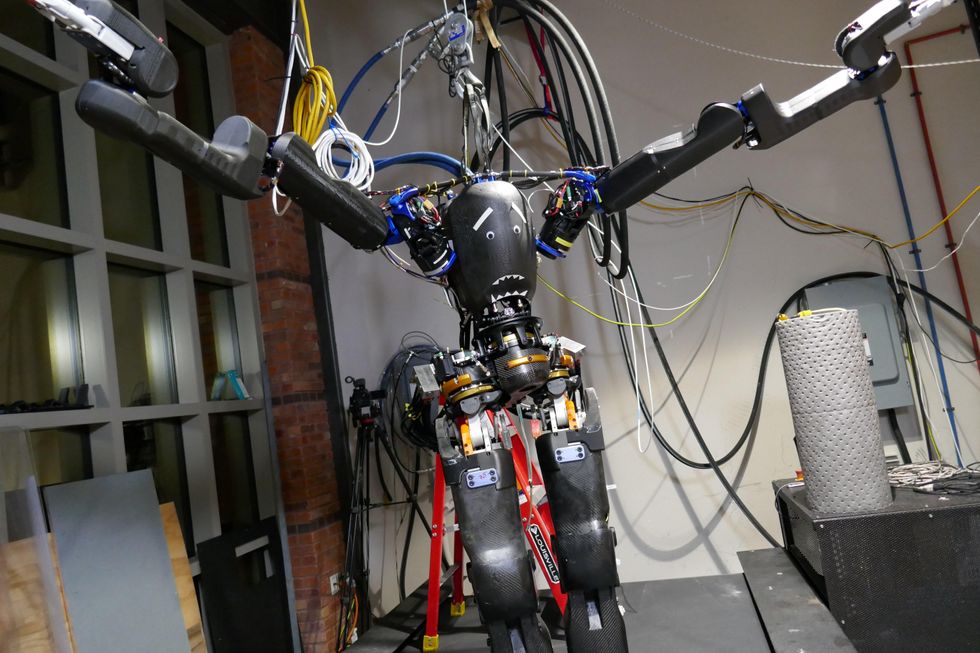
Who requires a real head when you have googly eyes and a shark mouth?IHMC
Even however Nadia is manufacturer new, IHMC currently has a bunch of updates prepared for the robot. The most obvious a single is slicing that tether by placing batteries and a tailor made hydraulic pump into Nadia’s torso. Also on the street map are higher torque arms and lighter, more streamlined legs. In the meantime, the software package has a large amount of catching up to do to allow Nadia to reach its full likely. And if we know IHMC, which is likely to be an amazingly thrilling detail to see.




More Stories
C++ overtakes Java in language popularity index
Electrohome Montrose turntable & McKinley speakers review
GitHub Copilot for Business plans unveiled